- トップページ
-
JCLCTN-3 ロボット リフティング コラム: 技術レビューおよび統合ガイド
数ブラウズ:0 著者:株式会社JIECANG 公開された: 2026-01-31 起源:https://www.jiecang.com/







JCLCTN-3 ロボット リフティング コラム: 技術レビューおよび統合ガイド

重要なポイント
高い安定性: 動的曲げモーメント 200Nm (静的 300Nm) に耐え 、ぐらつきを防ぎます。
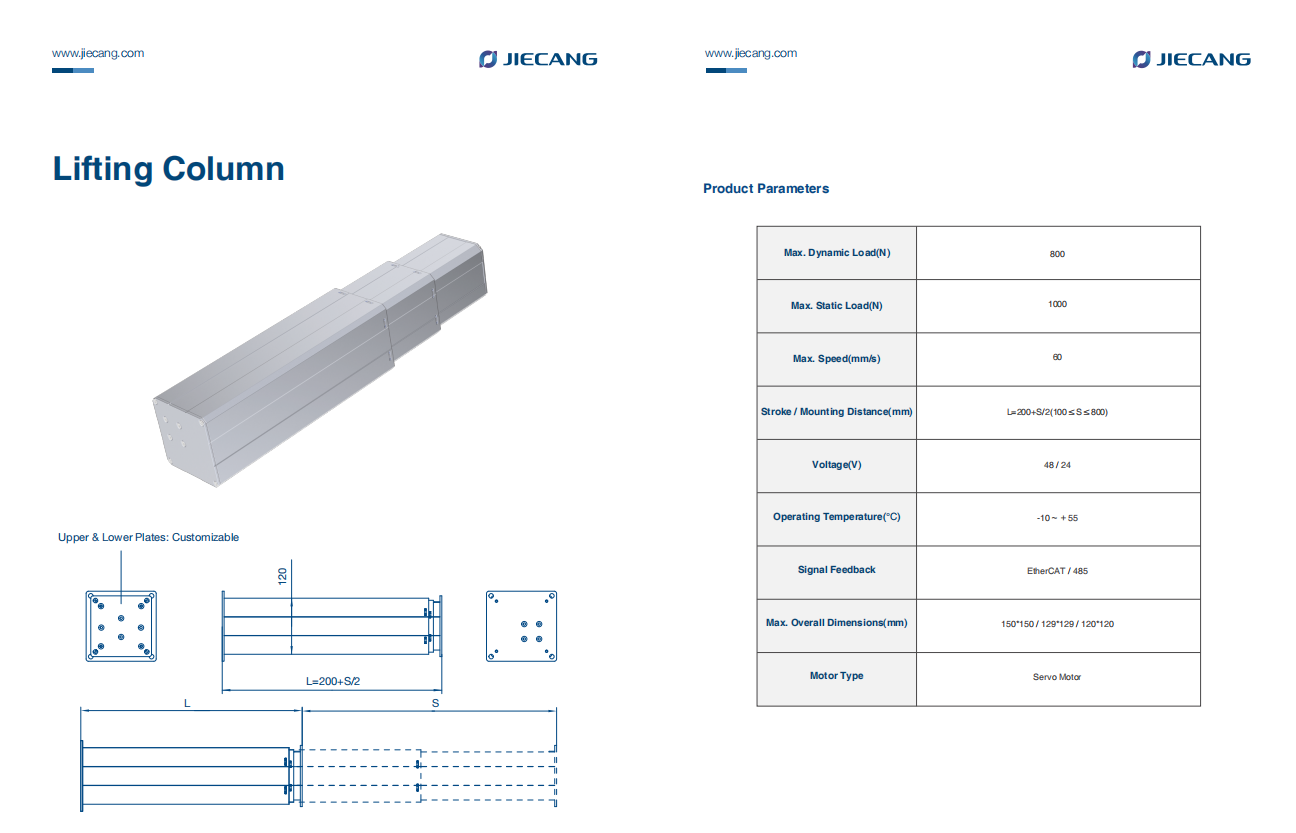
コンパクトなデザイン: 120mm x 120mm の プロファイルに内部ドライバーが統合されています。
パフォーマンス: 最大速度 60mm/秒;最大動的荷重 800N.
スマート コントロール: リアルタイムのロボット コラボレーションのための EtherCAT および RS-485 をサポートします。
耐久性: -10°C ~ 55°C の温度で動作します。.
移動ロボットの「脊椎」: 安定性解析
自律移動ロボット (AMR) の設計では、昇降システムがロボットの動作範囲と安定性を決定します。単に持ち上げるだけではありません。動作中にペイロードを安定に保つことが重要です。
JIECANG JCLCTN-3は、 「横荷重の安定性」 という重要な課題を解決するように設計されています。標準的なアクチュエータとは異なり、ロボットが加速または停止するときに発生する横方向の力に耐えるように構築されています。
動的曲げモーメント: 200 Nm
静的曲げモーメント: 300 Nm
エンジニアリングへの影響: この高い曲げモーメント容量により、AMR が平坦でない工場の床を移動する場合でも、協働ロボット (コボット) アームや精密センサー アレイなどの上部に取り付けられたモジュールが振動することなく安定した状態を維持できます。
寸法とコンパクトな統合
ロボットのシャーシ設計にはスペース効率が非常に重要です。バッテリー、LiDAR、コンピューティング ユニットを取り付ける際には、1 ミリメートルも重要です。 JCLCTN -3 は、 利用可能なスペースを最大化する高度に統合された構造を備えています。
カスタマイズされたサイズ/形状も利用可能
ドライブの統合: モーターとコントローラーを内蔵 (外部コントロールボックスは不要)。
JCLCTN-3 は 、駆動システムをコラム内部に統合することにより、 配線の複雑さを軽減し、よりクリーンでコンパクトなロボット設計を可能にします。
技術仕様データ
以下は、産業オートメーション標準向けに設計されたの検証済みのパフォーマンス指標です JCLCTN-3。
スマートな接続性と耐久性
JCLCTN -3 は、ロボットの「脳」(ロボット オペレーティング システム) とシームレスに対話できるように設計されています。
リアルタイム制御: EtherCAT または RS-485 を通じて、カラムは位置とステータスに関するリアルタイムのフィードバックを提供し、複雑な同期タスクの閉ループ制御を可能にします。
全天候適応性: -10°C ~ 55°C の広い使用温度範囲を備えたカラムは、コールド チェーン ロジスティクスから屋外パトロール ロボットまで、さまざまな環境に適しています。

次のステップは?
ロボット アプリケーションの JCLCTN-3 を検証する準備はできていますか?
[JIECANG ロボティクス コア ドライブ コンポーネントのダウンロード] https://www.jiecang.com/Lifting-Column-JCLCTN-3-pd550110748.html
【お問い合わせ先】 https://www.jiecang.com/contactus.html
















